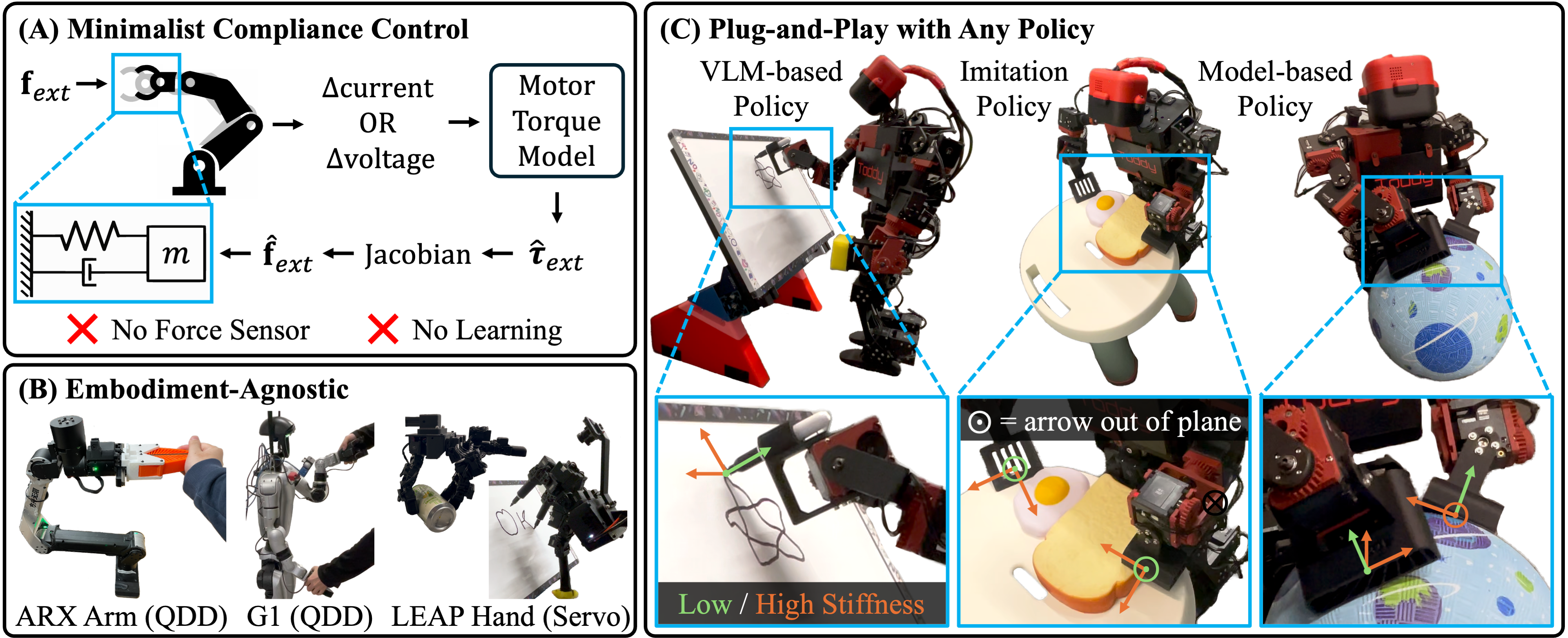
Minimalist Compliance Control (A) requires no force sensors or learning, estimating external wrenches directly from motor current or voltage signals using a motor torque model and Jacobians. These estimates drive a spring--mass--damper model to update task-space position references. (B) This minimalist approach generalizes across embodiment, from robot arm and dexterous hand to humanoid robot, and (C) remains plug-and-play with any policy such as VLM-based policy, imitation policy, and model-based policy, and across diverse tasks such as wiping, drawing, scooping, and in-hand manipulation.
VLM-based Policy for Drawing and Wiping
Given a text prompt (e.g., ``star'') and an initial stereo observation of the whiteboard, we use vision foundation models and VLMs to predict a 3D contact trajectory. Our controller maintains appropriate contact forces and stable interaction, whereas the position-control baseline frequently loses contact, applies insufficient force, or exerts excessive force, leading to task failure. Insufficient force typically fails to establish or maintain contact, while excessive force increases tangential friction and leads to larger tangential tracking errors.
VLM-based Policy with Locomotion to Wipe a Vase
Imitation Policy for Placing the Egg
We train diffusion policies with 200 demonstrations with either our method or position control as the low-level controller. Our method achieves a success rate of 80%, compared to 40% for the position-control baseline. The baseline often fails to stabilize the bread as a stopper or applies excessive force with the spatula, leading to poor tangential tracking.
Model-based Policy for Rotating the Ball
When contact location is known, a robust compliance profile can be computed in closed-form using optimally-conditioned hybrid servoing (OCHS). In the ball rotation task, our method achieves an average rotation of 21°, while the baseline either slips or rotates the ball by only 2°-3°.
VLM-based Policy for Finger Drawing and Wiping
We further evaluate on the LEAP Hand to show its effectiveness in dexterous manipulation.
Given the prompt ``Letter O and Letter K,'' a VLM-based policy predicts the 3D trajectory, which the compliance controller executes reliably. In contrast, the position-control baseline either fails to establish contact or tracks poorly due to excessive force.
Model-based Policy for In-hand Reorientation
For in-hand reorientation, we command target linear or angular velocities and execute a predefined sequence of commands. Our method achieves an average translation of 3.6 cm and a rotation of 27°, and can sustain reorientation for more than three cycles of translation and rotation commands. In contrast, the position-control baseline typically drops the object within the first few commands.
Compliance Controller Analysis
Comparison with RL Baselines
To evaluate our compliance controller against learning-based methods, we compare against two RL-based baselines, UniFP and FACET. In the evaluation, the heart-shaped target trajectory is generated by the VLM-based policy and executed by all methods. UniFP and FACET struggle to track the position accurately while maintaining appropriate contact force with the whiteboard. The external wrench estimation in our method is also crucial for regulating contact force.
Acknowledgment
The authors would like to express their great gratitude to the Toddy Team for hardware support and the members of Stanford TML and REALab for helpful discussions. This work was supported in part by the NSF Award #2143601, #2037101, #2132519, #2153854, Sloan Fellowship, and Stanford Institute for Human-Centered AI. The views and conclusions contained herein are those of the authors and should not be interpreted as necessarily representing the official policies, either expressed or implied, of the sponsors.